特色产品–用于高功率移动机器人的Whistle 20/100集成解决方案
Whistle是市场上唯一可以同时满足极端功率要求和高性能Chaos机器人紧凑空间的数字伺服驱动器。它使我们能够充分利用该设计优势,使Chaos的承载能力超过45千克(100磅),并且其最高速度可以与同类机器人相媲美,这是对以前实施方案的重大改进。产品支持也非常出色,Elmo工程师的响应需要几个小时而不是几天。
特色产品–用于高功率移动机器人的Whistle 20/100集成解决方案
Whistle是市场上唯一可以同时满足极端功率要求和高性能Chaos机器人紧凑空间的数字伺服驱动器。它使我们能够充分利用该设计优势,使Chaos的承载能力超过45千克(100磅),并且其最高速度可以与同类机器人相媲美,这是对以前实施方案的重大改进。产品支持也非常出色,Elmo工程师的响应需要几个小时而不是几天。
要求:具有CANopen通讯的紧凑型大功率运动控制
Elmo的 Whistle数字伺服 驱动器结构紧凑,功率密度高。此案例研究显示了我们的机器人行业客户之一,Autonomous Solutions Inc.如何利用他们来提高其Chaos移动机器人 平台的功能和敏捷性 。如果您在应用程序中考虑以下事项,那么本案例研究将使您感兴趣:
使用火柴盒大小的伺服驱动器实现高达1.6 kW的连续功率。
以小巧的外形实现高电流能力,最大程度地提高电动机扭矩输出。
最小化移动平台的重量。

机器说明
Autonomous Solutions的Chaos移动机器人是一个自主跟踪的机器人平台,旨在在地形复杂的地区实现高机动性。它可以携带各种传感器和有效载荷。
高机动性是由于四个履带臂既提供高速又具有力量。实时分布式控制系统可独立控制每个被跟踪的手臂,从而在陡峭,不平坦和松散的地形中实现敏捷性和多功能性。
Chaos机器人的四个履带臂使用两个电动机:(1)旋转臂和(2)进行履带运动。手臂的旋转允许机器人改变其姿势,爬过障碍物,抬高其身体等,并且轨道提供运动和转向。哨子的高功率输出可提供较高的手臂扭矩和手臂位置的快速变化,从而在重载下具有很高的灵活性。吹口哨时,哨子的强大动力使机器人可以在平坦的地面和陡峭的斜坡上快速移动。
机器人通过分布式控制系统中的CANopen控制。除Elmo的DS-301二进制解释器外,DS-402协议还用于运动控制。这使得Whistle的专有命令集可用于通过DS-402协议增强运动控制模式。

应用挑战
自治解决方案对Chaos移动机器人的主要目标是:
提高平台的速度和强度,以用于穿越地形,运载高负载和越过障碍物。
维护现有的控制体系结构和通信协议。
最大限度地减少设计占用空间,以减少驱动器所在的机柜的重量和尺寸。
Elmo的解决方案
所述 哨子 数字驱动被选择用于本申请中,由于其极端的功率密度和CANopen兼容性。
所述 哨子 非常紧凑,尺寸仅为55 X 46.5×15毫米(2.2“×0.6”×1.8“)和仅重将50g(1.8盎司)。在80 VDC时,其输出为1.6 kW – 20A。
选择在机器人中安装八台 WHI-20 / 100。
该 口哨 是Elmo的SimplIQ产品家族中的一员,特别设计的应用场合紧凑的尺寸,高功率密度,并有力执行标准通信协议最至关重要的。
业界领先的功率输出(> 1.6 kW)和紧凑型尺寸(55 x 46.5 x 15毫米)的结合。
强大的CANopen协议实施,遵循标准的通信和 运动控制 协议,同时由于丰富的命令集而允许扩展。
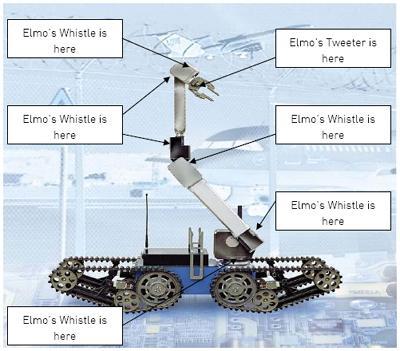
的 口哨 安装在所跟踪的臂和机器人主体之间的接合处。每个履带臂均使用两个 口哨 ,它们均安装在客户设计的PCB上。
所述 哨子 驱动器提供闭环运动控制,反馈输入,和通信支持。符合CANopen,DS-301通信协议和DS-402运动设备协议的要求,可使客户预先存在的机器人控制器向哨子提供高级运动命令 。另外,制造商特定的CANopen实施还允许在标准协议提供的内容之外进行控制和监视,而不会影响对标准的遵守。
骄雷科技致力于自动化科技、液压设备科技、机器人科技等领域内的技术开发,满足医疗器械的制造企业对于专业产品的需求,从事相关设备元器件的销售工作(包括德国倍福BECKHOFF全系列产品,ABB的交流伺服 、雅科贝思的直流电机、DD马达 、AVT的工业相机等),此外还提供自动化领域专业的一站式解决方案、定制化开发服务。在这里,骄雷科技竭诚为您服务。