机器要求
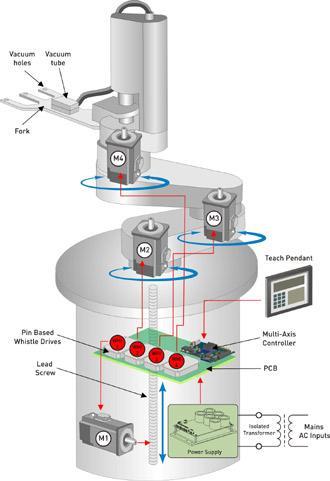
机器人具有四个自由度(DOF)和多关节臂。其中三个关节使机器人可以移动到平面上的所需位置,而第四个关节(中心轴)将其运动扩展到三个维度。精度,准确性和速度是此应用程序所必需的基本功能。
机器人由三个关节和手臂,一个用于将旋转运动转换为线性运动的上/下导螺杆关节,机器人的“手”和“手指”以及一个装有驱动器的外壳,多轴控制器组成。 ,电源和所有电子设备都位于。
 一家专门从事无尘室自动生产设备的大型半导体公司正在建造一个机器人,用于在无尘室环境中移动小型面板(例如智能手机中使用的LCD面板)。在生产过程中,LCD平板显示器要经历由自动化洁净室中的机器执行的多个过程。机械手传送LCD屏幕并将其“送入”机器。
一家专门从事无尘室自动生产设备的大型半导体公司正在建造一个机器人,用于在无尘室环境中移动小型面板(例如智能手机中使用的LCD面板)。在生产过程中,LCD平板显示器要经历由自动化洁净室中的机器执行的多个过程。机械手传送LCD屏幕并将其“送入”机器。
机器人具有四个自由度(DOF)和多关节臂。其中三个关节使机器人可以移动到平面上的所需位置,而第四个关节(中心轴)将其运动扩展到三个维度。精度,准确性和速度是此应用程序所必需的基本功能。
机器人由三个关节和手臂,一个用于将旋转运动转换为线性运动的上/下导螺杆关节,机器人的“手”和“手指”以及一个装有驱动器的外壳,多轴控制器组成。 ,电源和所有电子设备都位于。
机器人团队面临几个设计挑战:
机器人需要三个数字输出:(1)警报,(2)伺服开/关和(3)制动。
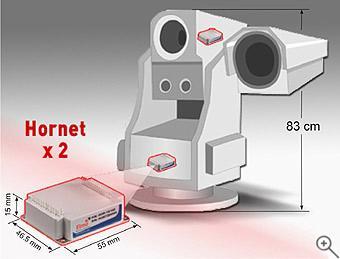
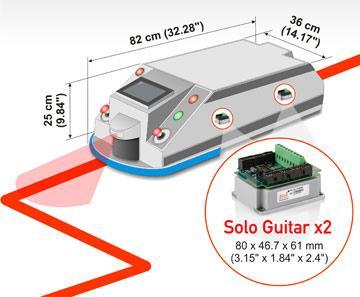
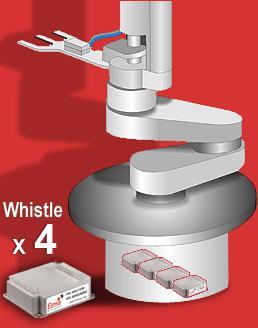
金哨子数字驱动器因其紧凑的尺寸而被选择用于此应用。它安装在PCB上,因此可以集成到机械臂的关节中。
Gold Whistle伺服驱动器旨在实现高可靠性并满足  最严格的工业应用需求。Elmo驱动器的高MTBF对于帮助最大程度地减少无尘室的停机时间至关重要。
最严格的工业应用需求。Elmo驱动器的高MTBF对于帮助最大程度地减少无尘室的停机时间至关重要。
可以提供40 A的峰值电流,以在机械臂的初始移动过程中实现较高的加速度。由于驱动器中实现了Elmo的高级运动控制算法以及Elmo专有的EASII编程软件,因此驱动器能够以非常精确和平滑的运动提供LCD屏幕。
机械手外壳中用于PCB(驱动器和多轴控制器),z轴丝杠和变速箱,电源,变压器和电缆等的空间非常有限。Elmo的紧凑型大功率驱动器至关重要尽量减少空间需求。
将Elmo的基于引脚的Gold Whistle伺服驱动器简单快速地集成到PCB上对于使工程开发时间最小化至关重要。不平衡的垂直轴由Elmo的上/下Gold Whistle伺服驱动器控制和调节,并使用特殊的输出来控制外部制动器。
自从设计无尘室机器人以来,Elmo引入了新的解决方案和选项。今天:
使用Elmo的Platinum伺服驱动器将增加高级功能安全功能,这对于该机器人非常重要,因为它可以在人附近使用。

4X 5000W伺服驱动器和4轴
运动控制器